


































































































车型规格 |
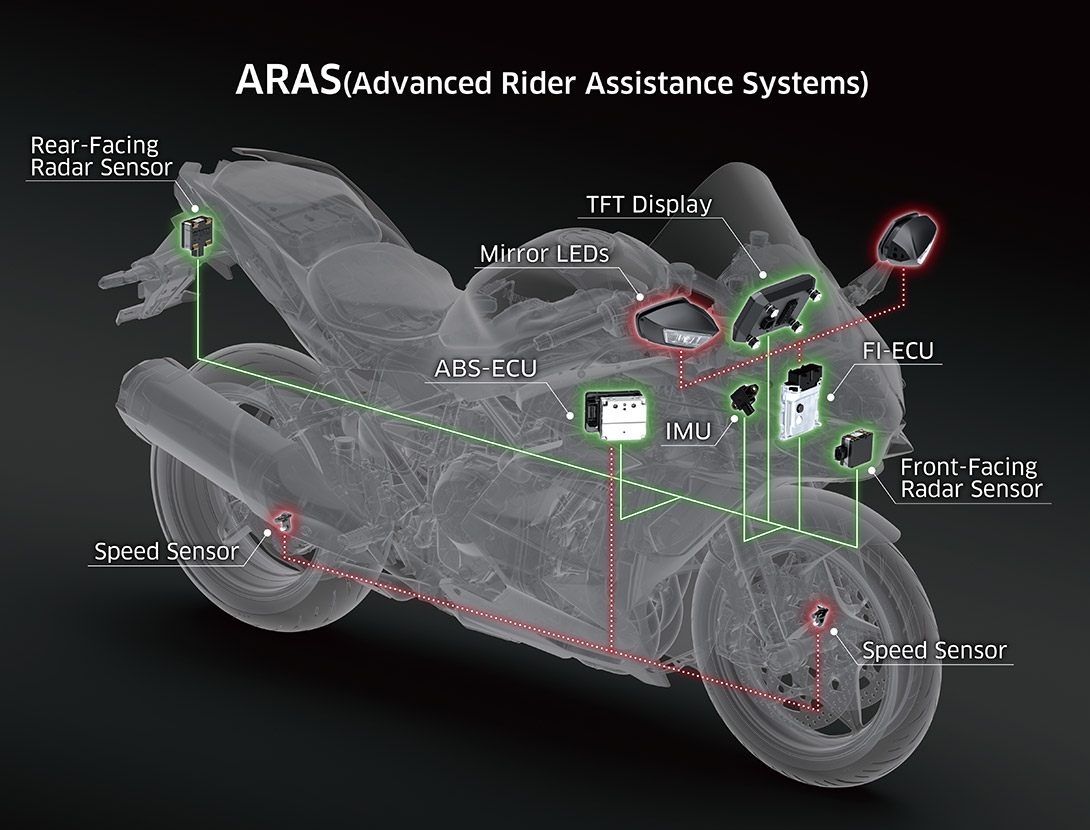
先进的骑手辅助系统
自适应巡航控制、前部碰撞预警和盲区监测
川崎电子悬挂系统(KECS)
Skyhook技术
點擊一項技術以了解更多信息
| 引擎管理技术 |
| 最大功率 | 147.1 kW {200 PS} / 11,000 rpm |
| 最大功率(空气冲压状态) | 154.1 kW {210 PS} / 11,000 rpm |
| 最大扭矩 | 137.3 Nm {14.0 kgfm} / 8,500 rpm |
| 发动机型式 | 水冷直列四缸四冲程 |
| 排量 | 998 cc |
| 缸径 x 行程 | 76.0 x 55.0 mm |
| 压缩比 | 11.2:1 |
| 配气系统 | DOHC 16气门 |
| 燃油系统 | 电喷ø40 mm x 4 双节流阀 |
| 进气系统 | 川崎机械增压 |
| 点火方式 | 电控数字化 |
| 启动方式 | 电子启动 |
| 润滑方式 | 油冷器湿式强制润滑 |
| 变速箱 | 6速往复式 Dog-Ring变速箱 |
| 初级传动比 | 1.480 (74/50) |
| 1档齿比 | 3.077 (40/13) |
| 2档齿比 | 2.429 (34/14) |
| 3档齿比 | 2.045 (45/22) |
| 4档齿比 | 1.727 (38/22) |
| 5档齿比 | 1.524 (32/21) |
| 6档齿比 | 1.348 (31/23) |
| 末级传动比 | 2.444 (44/18) |
| 离合器 | 湿式多片离合器 |
| 传动方式 | 链式传动 |
| 车架型式 | 网格式高拉力钢车架,含后摇臂固定 |
| 前悬挂 | ø43 mm倒置前叉,KECS电子悬挂系统,回弹及压缩可调,可手动设置预载,Top-out式弹簧 |
| 后悬挂 | New Uni Trak后悬挂,配备BFRC lite 背负式气瓶,KECS电子悬挂系统,压缩回弹可调,预载电子控制系统 |
| 前轮轴间距 | 120 mm |
| 后轮轴间距 | 139 mm |
| 前倾角 | 24.7° |
| 拖曳距 | 103 mm |
| 转向夹角 | 30° / 30° |
| 前轮型式 | 120/70ZR17M/C (58W) |
| 后轮型式 | 190/55ZR17M/C (75W) |
| 前刹车 | 半浮动ø320 mm 双碟 |
| 前夹器 | Brembo Stylema辐射径向对四卡钳 |
| 后刹车 | ø250 mm碟刹 |
| 后夹器 | 双活塞 |
| 尺寸(长x宽x高) | 2,175 x 790 x 1,260 mm |
| 轴距 | 1,480 mm |
| 离地间隙 | 130 mm |
| 座高 | 835 mm |
| 整备质量(湿重)* | 264 kg |
| 油箱容量 | 19升 |
*整备质量包括正常行驶所需的所有材料和液体、满油箱(容量超过90%)和工具包(如果提供)。
**预估干重 (不带机油、冷却液、燃油、工具状态下)
川崎注意事项:骑乘时请始终佩戴头盔、护目镜及穿着骑行服,切勿在服用药物和酒精饮品后骑乘摩托车,请阅读《用户手册》及相关产品注意事项,专业级车型请在封闭道路驾驶
规格可能发生变动
ACC(自适应巡航控制)为新一代先进的电子巡航控制,ACC可根据骑士设定的速度进行巡航,同时能够保持与前车的安全距离。
车头配备的前置雷达感应系统通过毫米波雷达对所在车道的前方进行扫描,结合多种参数,例如车头最近障碍物的距离、道路坡度、前/后轮轮速、用户设定的距离数据(近、中、远)。
当车体前方距离不够充分,系统判断需要减速。当减速制动不及时,系统还会使发动机制动介入,当需要大力制动时,系统亦会直接激活刹车。直到确保足够的安全距离后,系统会判断并保持设定车速。
ACC(自适应巡航控制)
由于在离合器中心和压盘的接合处、设计安装了辅助凸轮和缓冲凸轮这两种凸轮装置、这种离合器与传统的离合器单位不同,是同时具备了两种机能的离合器。
通常的引擎转动时、助手凸轮带来的自我伺服效果辅助实现了离合器盘的压接。大幅度减轻了离合器操纵杆的操作力,从而实现了骑手的疲劳,让骑手得以轻松的驾驶摩托。
此外、急减速和错误换档等操作导致过度的引擎制动时,缓冲机能开始运转。缓冲凸轮减轻了离合器盘的压接、放松了回复力矩、降低了后轮的震动和打滑。有望实现在急转弯行驶时非常迅速的急减速。

滑动辅助离合器
川崎车型采用高精度电子控制系统管理发动机,可实现优异的燃油经济性。但油耗高低很大程度上取决于骑手的操作,包括油门操控、挡位选择等人为操作因素。
节油骑行提示功能可实时显示当前行驶工况是否处于低油耗区间。该系统持续监测油耗数据,不受车速、发动机转速、油门开度等行驶条件影响。当车辆在当前行驶速度下油耗偏低(即燃油经济性佳)时,仪表盘会亮起 “ECO” 标识。骑手保持骑行状态使 ECO 标识常亮,即可有效降低燃油消耗。
不同车型对应的经济车速与发动机转速区间有所差异,骑手留意能触发 ECO 标识亮起的行驶状态,有助于提升燃油利用率,从而增加续航里程,十分实用。此外,减少燃油消耗也能降低车辆行驶对环境造成的不利影响。

经济骑行提示灯
川崎全电子油门驱动系统,让电控单元(ECU)能够分别通过喷油器控制供油量、通过节气门控制进气量,精准调配输送至发动机的油气总量。精准匹配的喷油量与节气门开度,可带来平顺、线性自然的发动机动力反馈,输出理想动力,同时该系统还能大幅降低尾气排放。
依托电子节气门,S-KTRC、KTRC 等发动机电控管理系统得以实现更高精度的调控,同时也为多种电控功能提供硬件基础,包括川崎起步控制系统 KLCM、川崎发动机制动控制系统、双向快速换挡 KQS 以及电子定速巡航。

电子油门
Kawasaki Engine Brake Control能够让骑手调整引擎制动力,当该系统被激活时,引擎制动的制动力会减弱,从而更适应赛道驾驶的需求。
依托川崎新一代高阶建模软件,搭配紧凑型惯性测量单元(IMU)提供的高精度车身姿态实时数据,川崎弯道管理控制系统(KCMF)可全程监测车辆入弯、弯心、出弯全阶段的发动机与车身各项参数,动态调节制动力与发动机动力输出,实现加速与制动之间顺滑切换,辅助骑手沿着预想路线稳定过弯。
不同车型搭载的 KCMF 协同电控系统存在差异,涵盖以下功能:
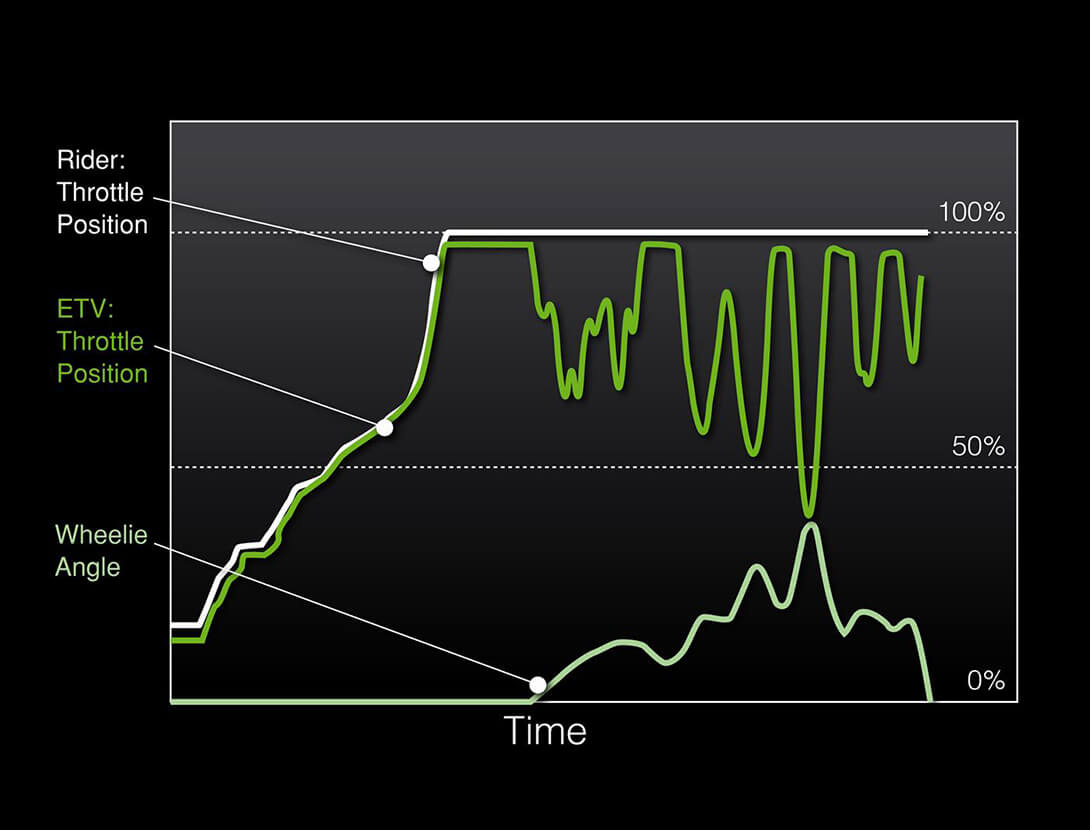
S-KTRC/KTRC(牵引力控制、防抬头控制)
KLCM 起步控制系统(牵引力控制、防抬头控制)— 专为赛道静止起步优化加速表现
KIBS 智能防抱死制动系统(俯仰控制、弯道制动控制)
ABS 防抱死制动系统(俯仰控制、弯道制动控制)
川崎发动机制动控制系统

川崎弯道管理控制系统(KCMF)
起跑是摩托车赛启动的要点。只要一点点的差别,就能左右是否实现领先过弯。在易滑路面行驶的摩托车需要很精细的控制油门和离合器。
启动控制模式通过对引擎的管理辅助满足实现了对技术要求很高的起跑。作为批量生产的赛车用摩托,首次搭载了可以切换到启动专用的引擎特性的系统KX450F。摩托车赛的最高峰,AMA(American Motorcycle Association)super cross冠军赛,参与角逐赛车冠军的川崎团队也使用了这个系统。
按下装载了操控手柄的按钮的话,引擎的控制画面就会切换到启动控制模式。在这个模式下点火会比标准时间略晚,可以防止急剧的扭矩变动,减少启动时轮胎的打滑现象。启动控制模式在启动后,只有当齿轮是1速和2速的时候才运作,当骑手切换到3速的时候启动控制模式就会被解除,回复到标准的引擎画面。在实战中可以发挥出更大的潜能,是取得胜利的利器。
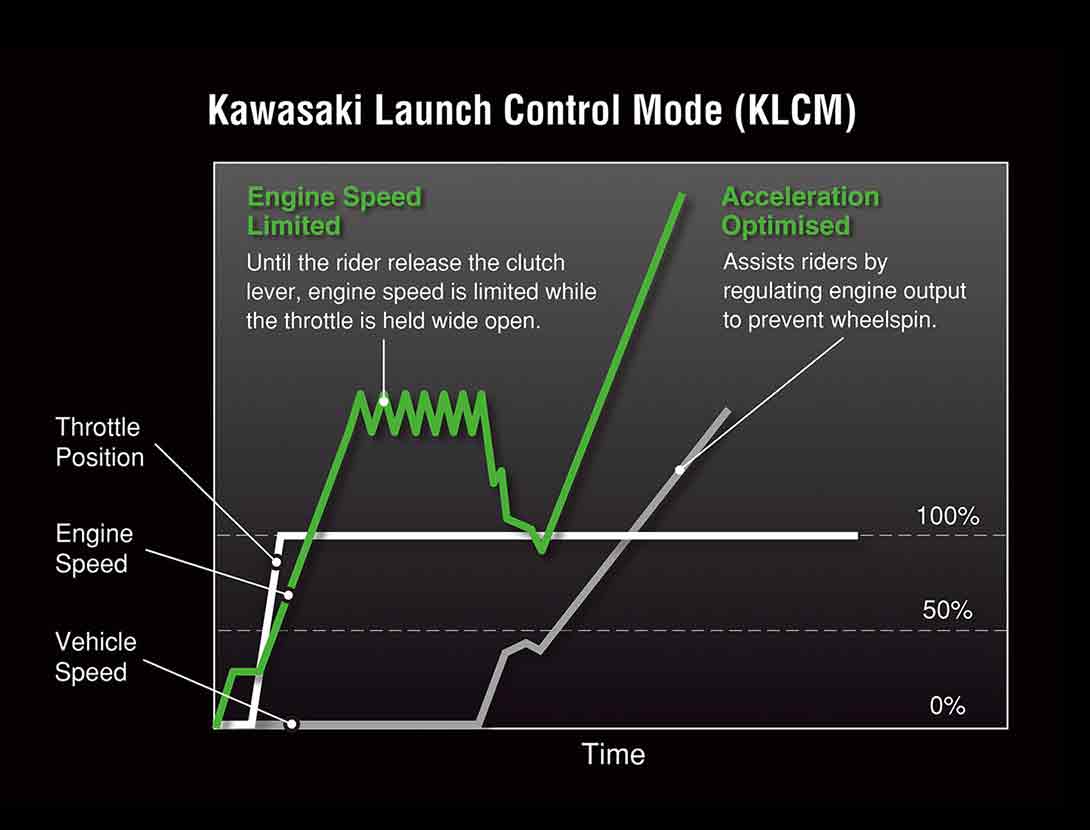
KLCM(川崎弹射起步控制)
KQS (Kawasaki Quick Shifter) ,专为赛道设计, 通过离合,传输信号至ECU改变点火,从而让骑手能够在油门全开的情况下不使用离合器进行升档。

KQS(川崎快速换档)
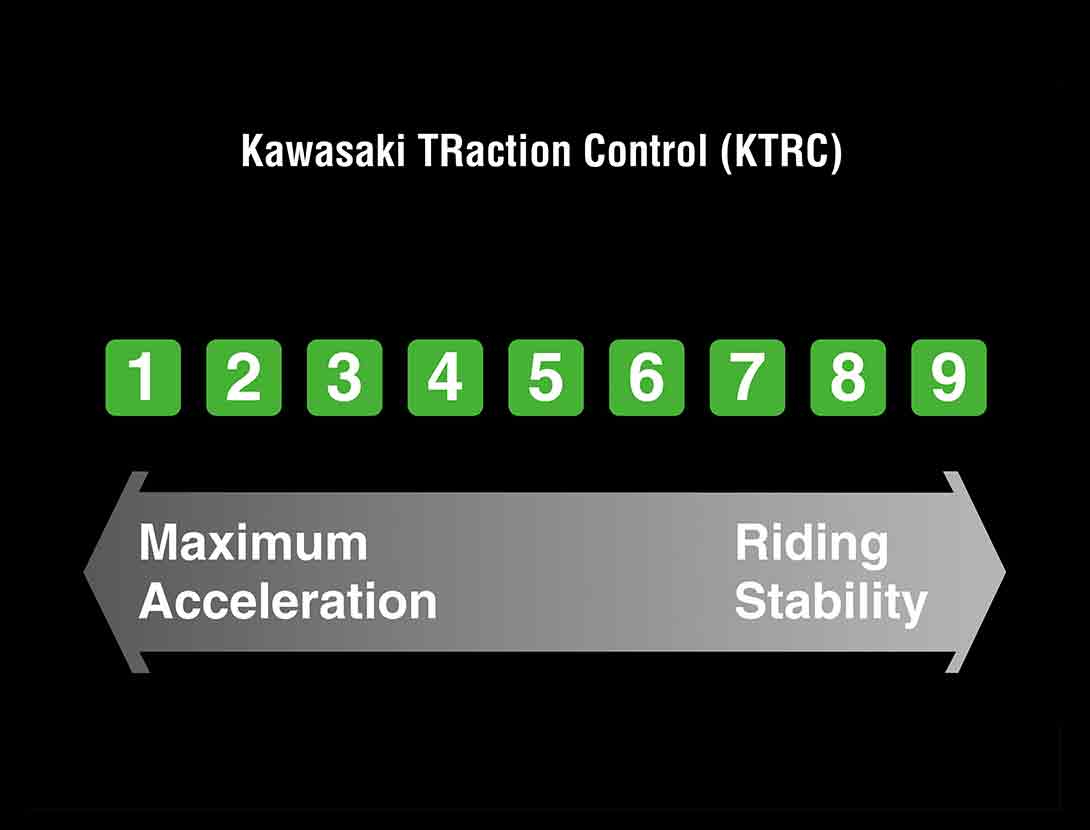
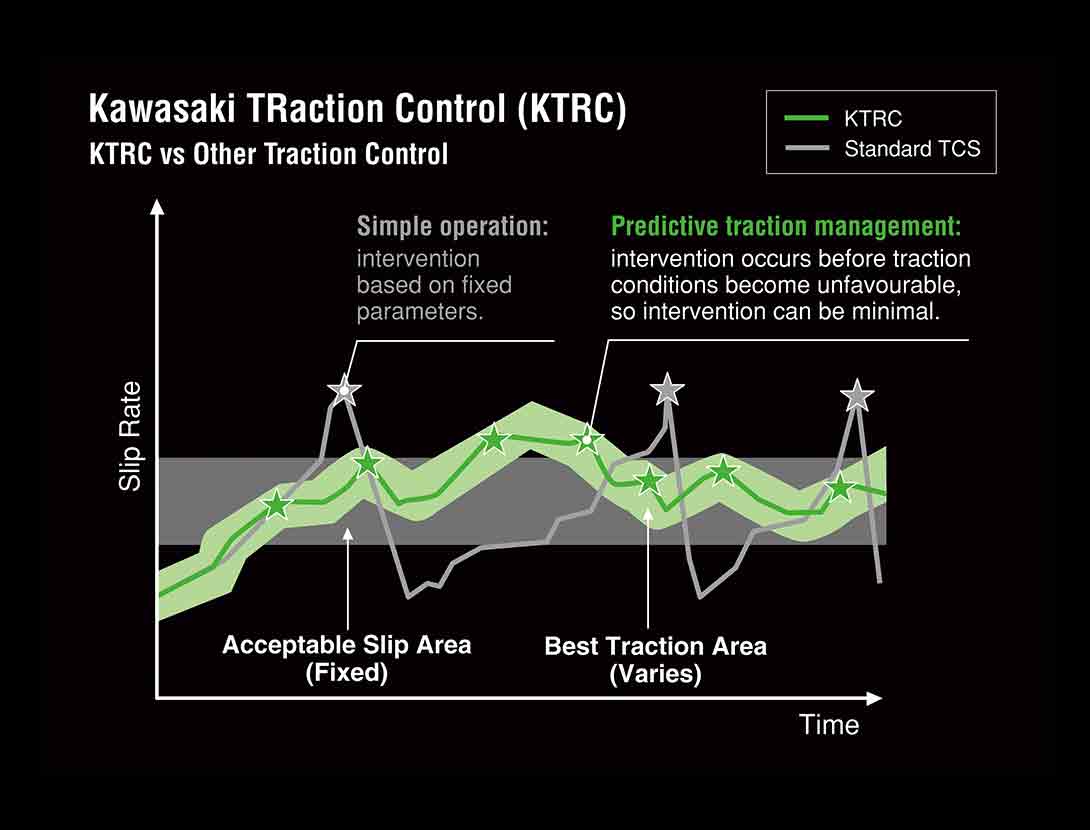
川崎牵引力控制系统(KTRC)是一套高性能牵引力电控系统,既能强化运动骑行表现,也能让骑手在低抓地力路面安心骑行。系统配备多档可调模式(车型不同,档位数量存在差异),介入强度逐级提升,适配各类路况与骑手驾驶习惯。
低介入档位可在过弯时维持最优抓地力。该档位专为激烈运动骑行调校,能最大化后轮驱动力,助力骑手出弯加速。川崎精密算法以车身相对路面的姿态作为动态分析基准(而非单纯参照水平平面),可识别弯道倾角、路面坡度等信息并同步适配控制逻辑。
高介入档位下(部分车型所有档位均具备该逻辑),系统检测到后轮大幅空转时会削减发动机动力,帮助轮胎快速恢复抓地力。骑手面对铁轨、井盖这类短距离低附着路段,或是湿滑柏油、石板路、碎石等长距离易滑路面,都能从容通过。
搭载惯性测量单元 IMU 的车型,可接入车身姿态传感信号,实现更精准的动力防滑调控。
越野车型专属 KTRC 可抑制低附着力路况下后轮过度空转,顺畅完成出弯加速;多档位调节功能支持骑手根据个人习惯、场地路况自定义牵引力介入强度。
川崎牵引力控制系统(KTRC)
搭载多档动力模式的车型,骑手可便捷切换发动机动力输出特性,匹配路况或个人骑行习惯。不同车型的动力模式档位数量与类型均存在差异:部分模式会限制发动机最大功率,部分模式调校出更柔和 / 更灵敏的油门响应,还有专属模式针对特定骑行场景优化。
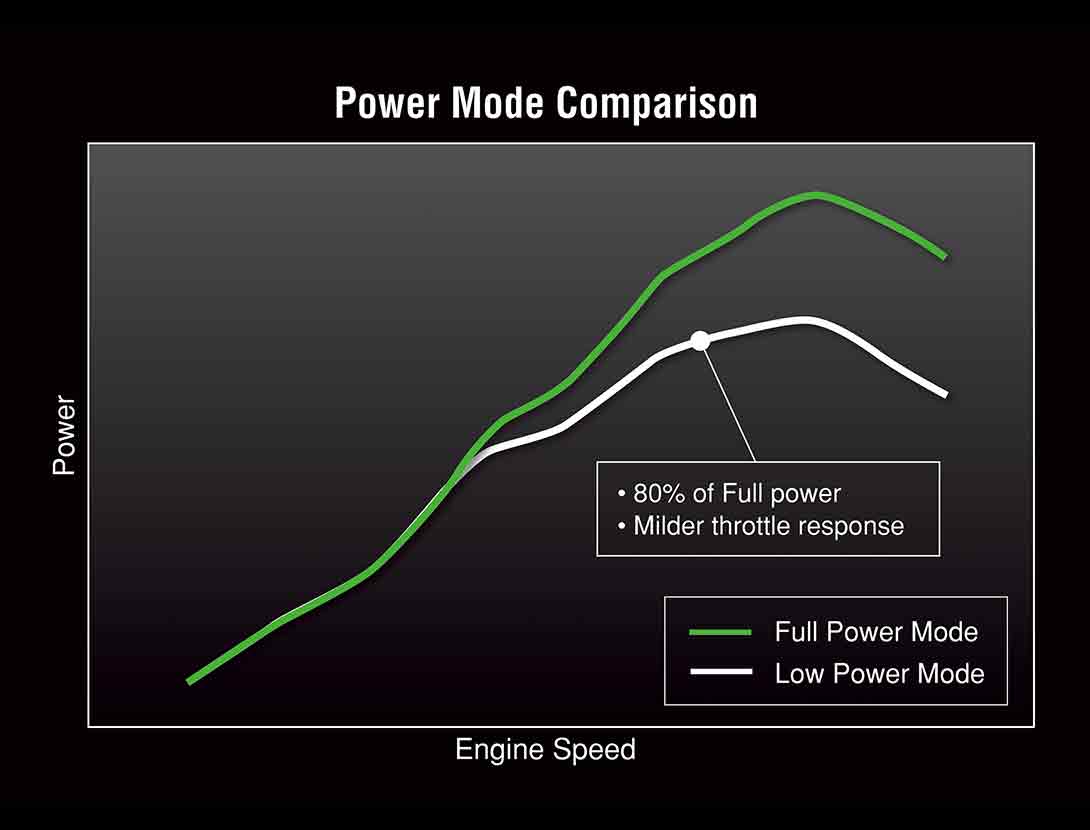
动力模式
依托川崎重工集团积累的技术底蕴与研发经验,川崎机械增压发动机在结构紧凑化的同时实现了超高动力输出。这套强悍性能的核心在于专用机械增压器:该部件由川崎内部全自主开发,融合集团燃气轮机机械事业部、航空航天事业部及中央技术研究院的尖端技术。
自主研发并针对发动机特性定制匹配增压器,带来一大核心优势 —— 工程师可实现全域工况高效运转;若直接换装或改装市面上通用汽车改装增压器,完全无法达到同等效果。
增压器高效率的关键价值在于压缩空气过程中产生的损耗性热量极少。多数增压器仅能在极小工况区间保持高效,而川崎增压器可在宽广增压比与空气流量区间维持高能效,覆盖发动机转速与整车行驶速度的全部常用范围。这种宽泛高效工作区间(等同于宽阔动力输出区间)直接转化为强劲加速表现。
得益于增压器高热效率、低发热特性,摩托车型无需配备中冷器,大幅缩减重量与占用空间,实现发动机小型化紧凑布局。
川崎高性能并排座全地形车所搭载的机械增压发动机,因车体预留安装空间更充裕,配备了进气中冷装置。冷却进气可提升进气容积,进一步强化整车综合动力性能。


机械增压引擎
川崎防抱死制动系统(ABS)通过前后轮传感器持续监测车轮转速。若任意一组传感器传回的数据显示车轮发生抱死,ABS 电控单元将控制 ABS 总成内的油泵调节制动液压力(泄压后再重新建压,以此恢复轮胎抓地力),直至制动工况恢复正常。配备前轮 ABS 的车型,工作原理与此一致。
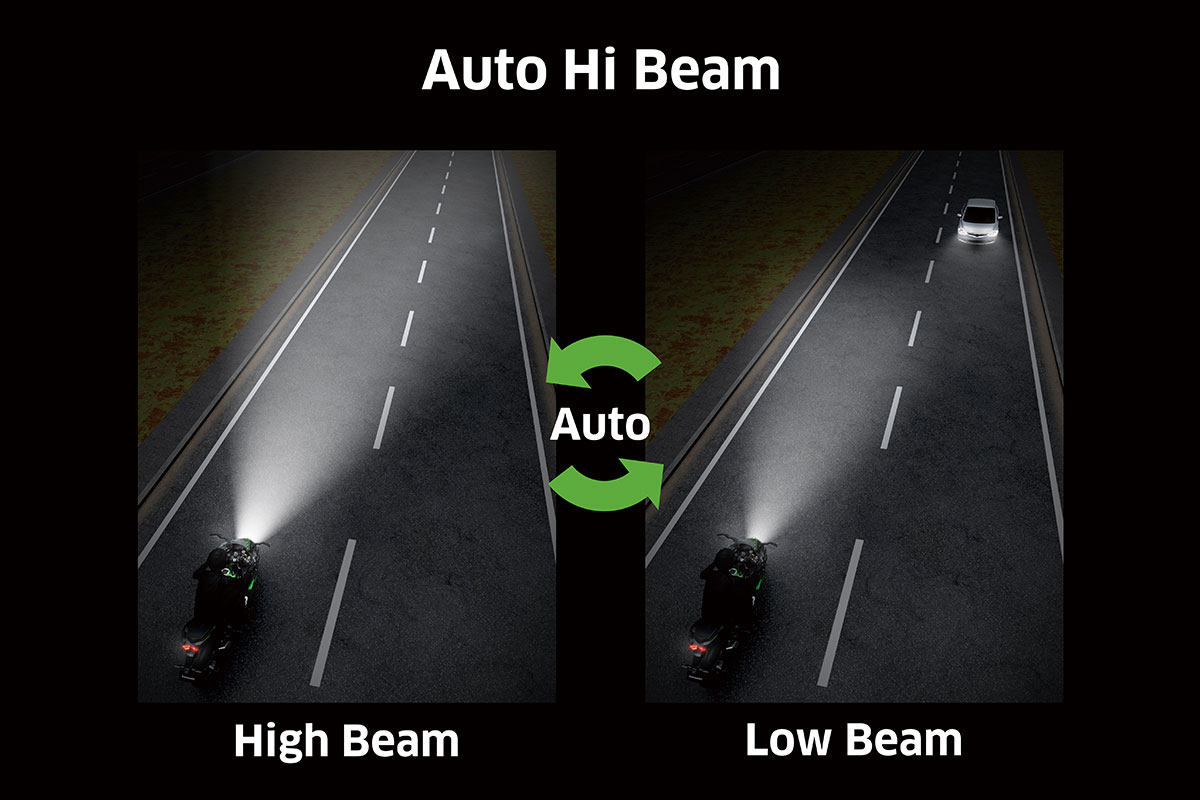
AHB(自动远光灯):
车型搭载的感应器能够根据前灯照射环境或者路面光照程度自动开启或者关闭远光灯以获得更安全的骑行环境。
该系统作用的条件是开关必须切换在远光模式并且车速高于20km/h,行驶在较为昏暗的环境下。当系统开始工作时,仪表盘相应的标志会显示绿色。
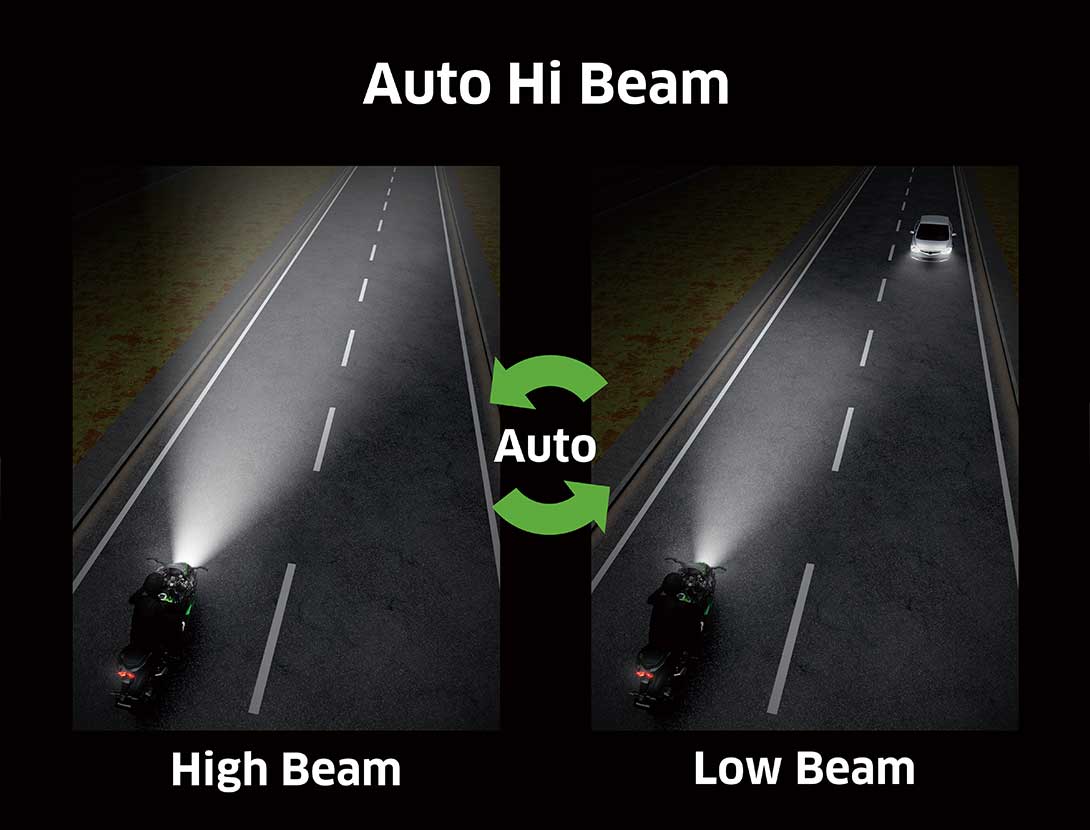

AHB(自动远光灯)
BSD(盲区监测)通过监测车体周围环境并对盲区接近车辆进行预警。
后置的感应雷达监测车道左右后方的情况。当有车辆接近时,后视镜内的LED提示灯将亮起(BSD功能不会对正后方以及离开车体周围的车辆进行提示)。
当骑士准备变道并打转向灯时,如果监测到盲区有风险,提示灯会闪烁进行提示。
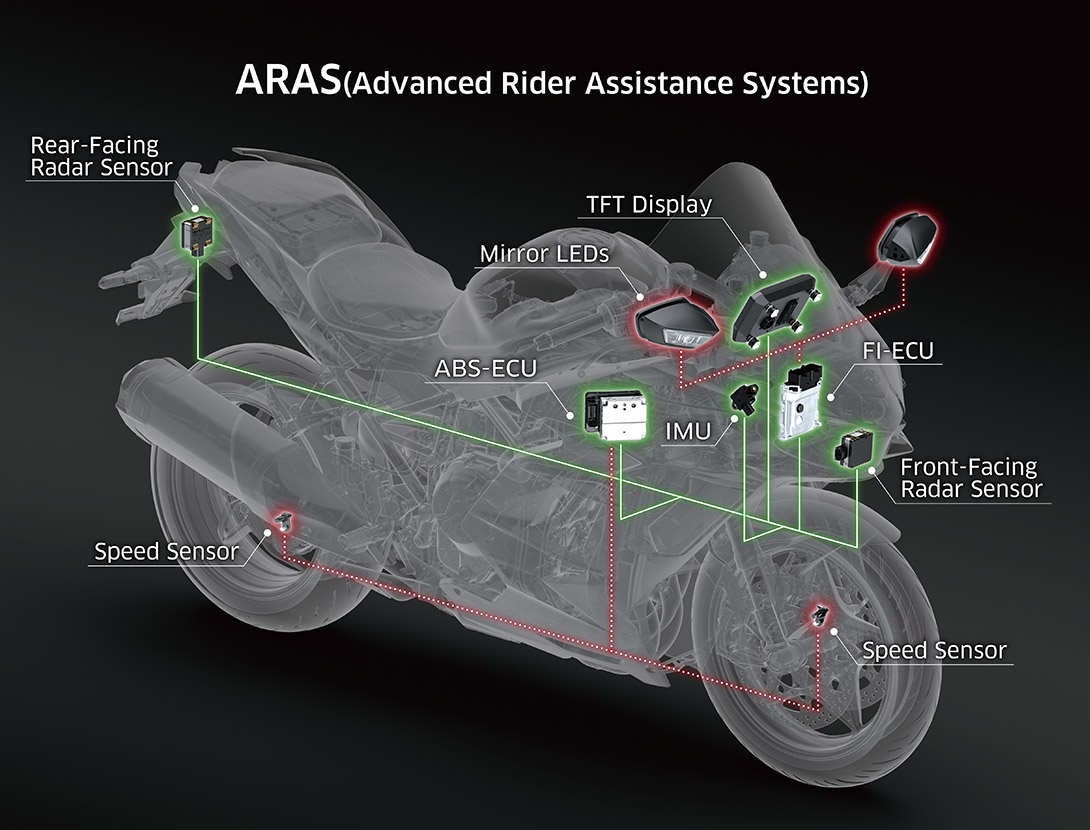
BSD(盲区监测)
大力制动时,紧急制动警示系统(ESS)会令刹车灯或转向灯持续闪烁,以此向后方尾随车辆发出视觉警示,提醒前车正在急速减速。
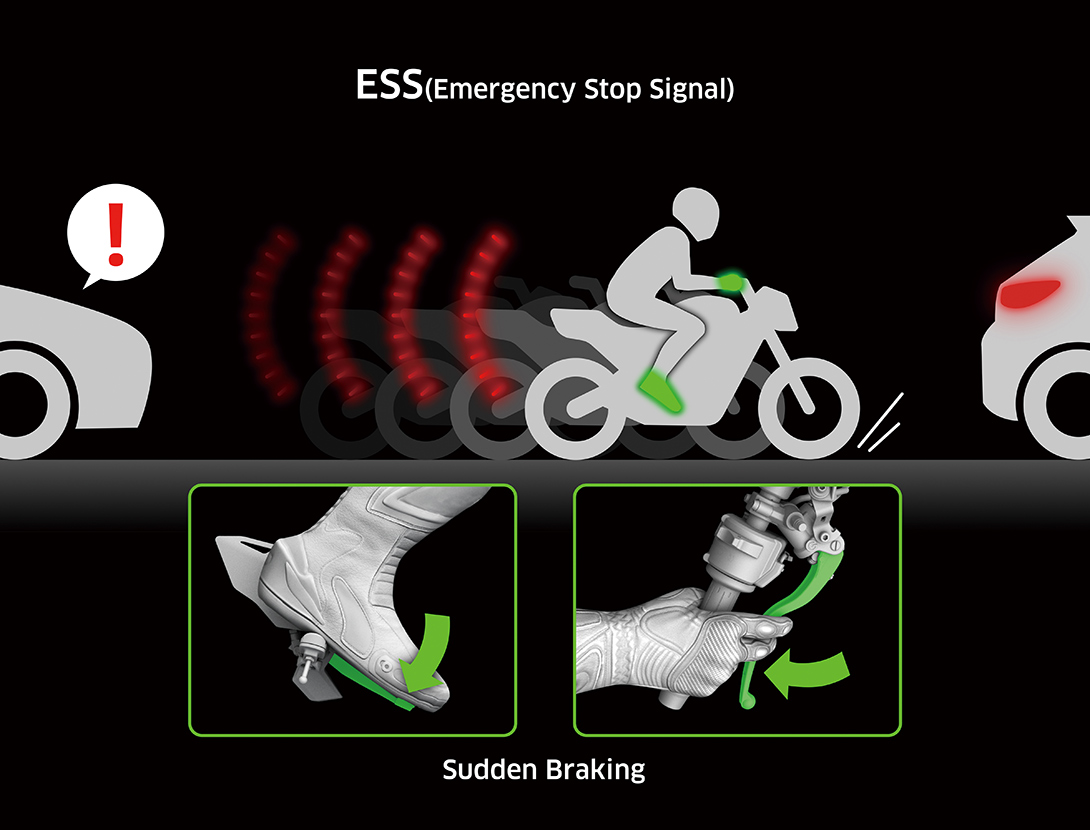
紧急制动警示系统(ESS)
若系统判定以当前车速持续行驶将与前车发生碰撞,便会向骑手发出预警。
车头雷达传感器实时监测前车距离与相对车速。当前车距离过近、保持现有车速存在碰撞隐患时,系统会通过仪表盘上方醒目的红色 LED 闪烁灯,或在 TFT 彩色仪表屏弹出警示信息提醒骑手。
骑手可根据自身习惯自定义预警触发时机,共有三档可选:提前预警、标准预警、延迟预警。
前方碰撞预警系统(FCW)
川崎尖端电控系统的核心优势,在于其高度精密的程序算法:仅依靠精简硬件,就能让电控单元(ECU)实时精准掌握车身动态。川崎专属动态建模程序持续分析多项运行参数,可同步兼顾路面、轮胎工况的实时变化。
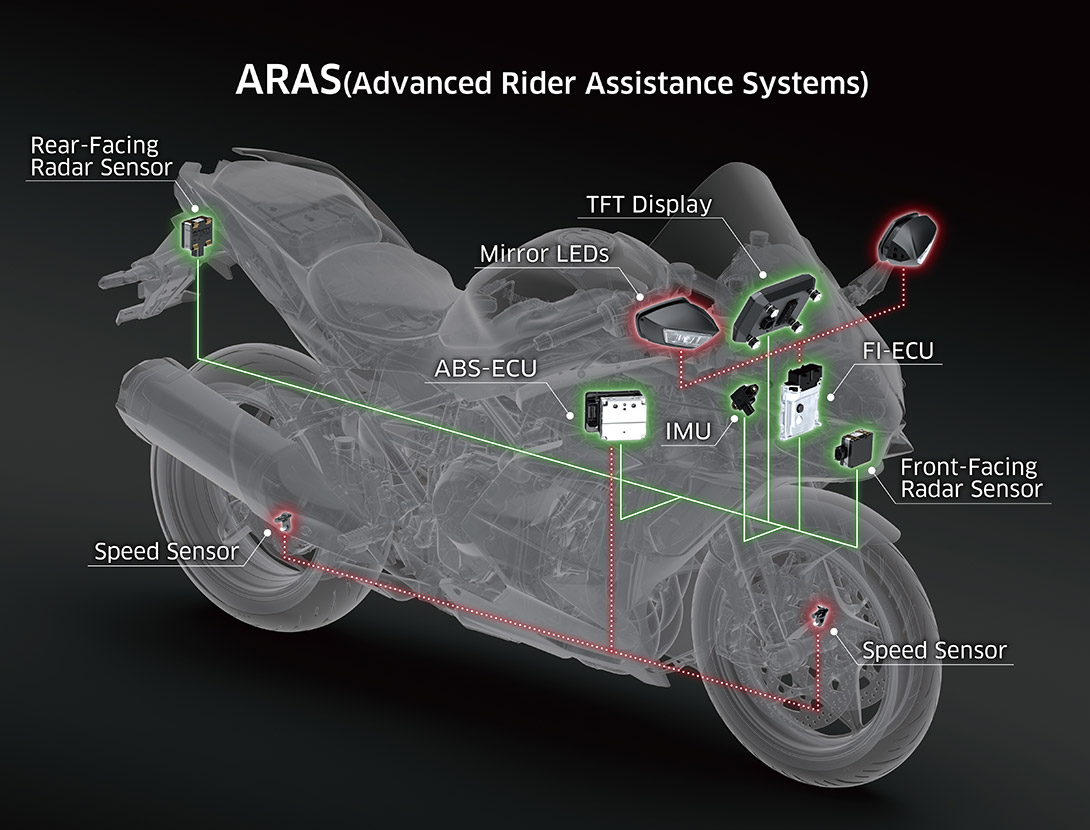
搭载惯性测量单元(IMU)后,系统能够监测六自由度(6 DOF)惯性数据:纵向、横向、垂直三轴加速度,以及侧倾角速度、俯仰角速度、横摆角速度。新增的这部分传感反馈,让车身姿态实时画面更加清晰,助力电控系统在车辆极限工况下实现更精准的动力与稳定控制。
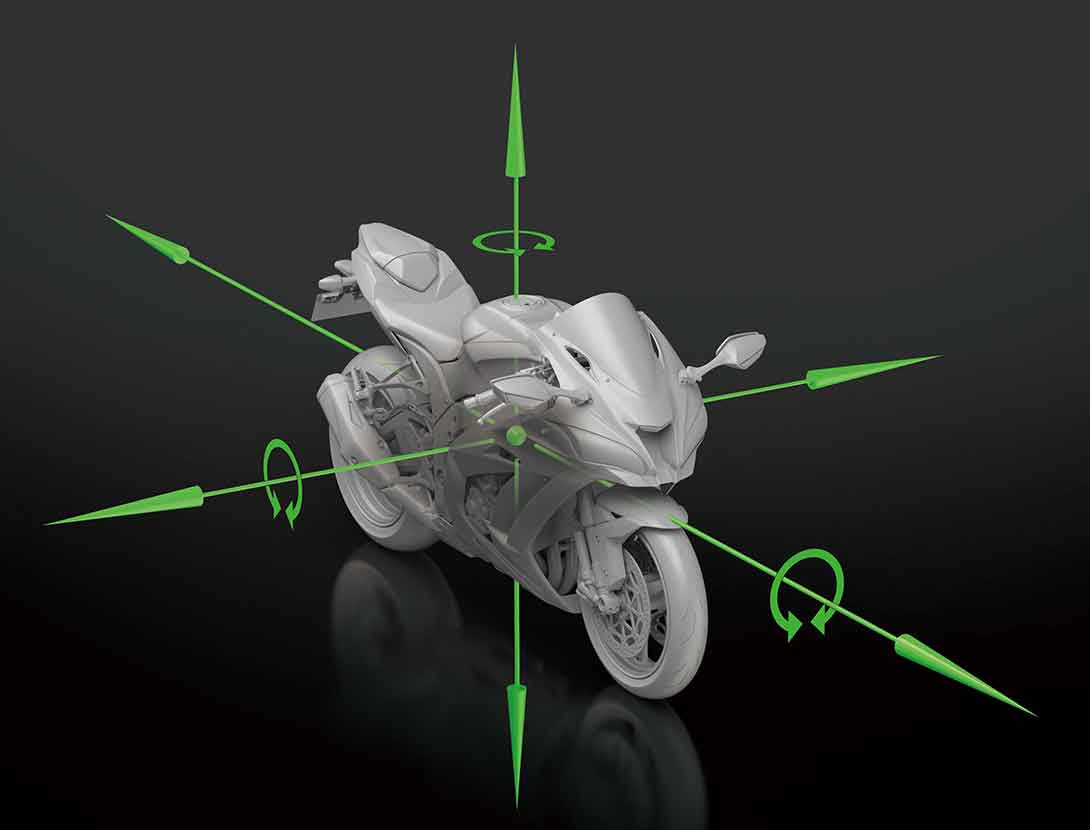
增强型IMU感应系统
川崎电子悬挂控制系统(KECS)可实时适配路面与骑行工况,通过电控方式调节阻尼,依据车速与避震伸缩速度输出适配的阻尼力度。系统同时采集车辆减速度数据,抑制制动时容易出现的车身俯仰晃动。
系统采用电磁阀直驱控制,响应速度极快,非常适合运动骑行场景,能带来自然顺滑的操控反馈,实现人车合一的骑行感受。前叉与后减震均内置行程传感器,实时采集避震伸缩速度与压缩量。
除传感器线圈向 KECS 电控单元传输数据外,系统还同步接收惯性测量单元 IMU 的加减速信号、燃油喷射电控单元 FI ECU 的车速信号。KECS 电控单元根据综合车况输出电流驱动电磁阀,按需实时调整阻尼大小。
部分车型搭载昭和 Skyhook 天钩算法:该算法虚拟出一个支点承托车身簧上质量,动态调节避震阻尼,让车轮紧密贴合路面,同时尽可能保持车身垂直稳定,大幅提升行驶平稳性。
适配全地形 UTV(侧双座车型)的 KECS 系统,融合高性能 FOX 内置旁路、实时阀控避震技术,搭配博世电控单元与川崎原厂专属避震调校,在各类路况下兼顾舒适驾乘与强悍通过性能。部分车型在每根减震下方单独配备加速度传感器,相比座舱内的 IMU 可更快感知地形起伏,显著提升车轮贴地性能。
系统提供多档预设模式,骑手可自行选择偏柔软或偏硬朗的基础避震设定。
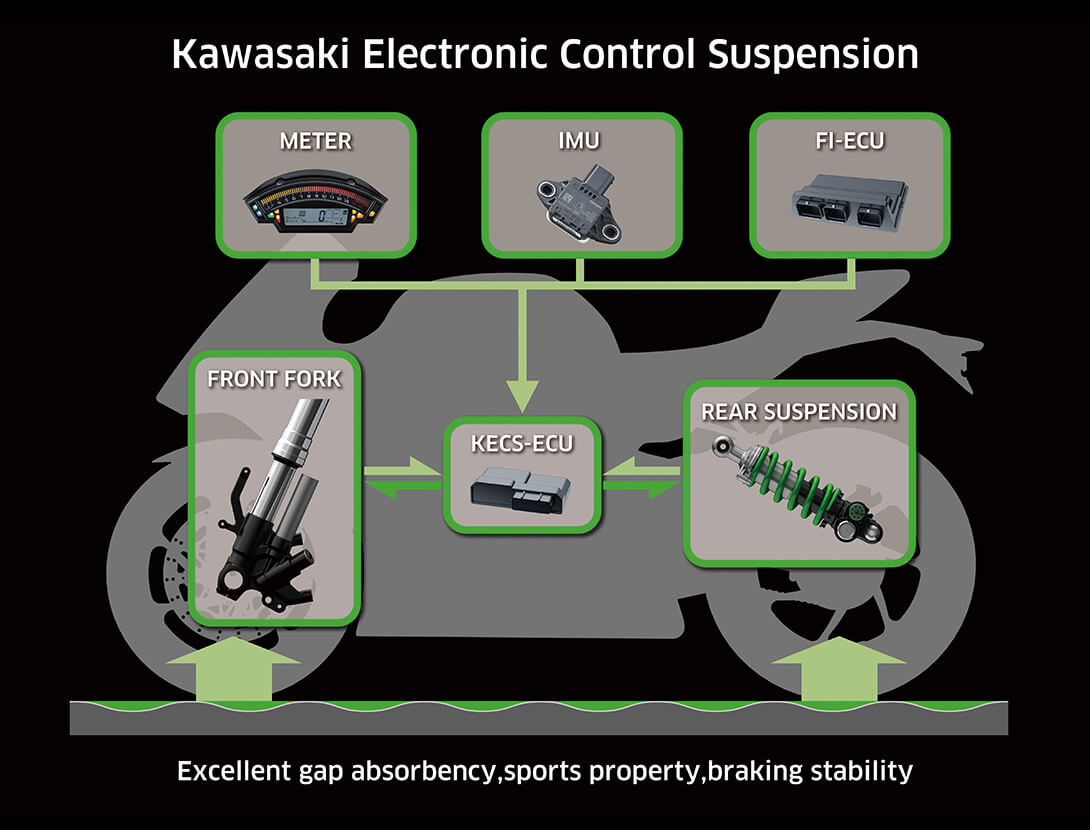
川崎电子悬挂控制系统(KECS)

超级运动模式要求刹车在尽可能短的时间内,正确的减速到目标速度。为了满足这一需求,川崎开发了KIBS(Kawasaki Intelligent anti-lock Brake System)刹车系统。为了实现最有效的优质刹车为目的,第一次让批量生产的摩托车的ABS控制模块和引擎的ECU控制系统相连。
该模式不仅仅是对后车轮的转动数,还有在前卡钳上的液压,油门的打开度,引擎的转动数以及离合器的间歇状况等多种多样的情报进行分析,得到最适合的液压值。ABS运作时对液压进行精密的控制,不会像以往的ABS那样过多的使液压压力下降。通过KIBS我们实现了刹车时对后轮的打滑现象的压制,保持减速时对后轮制动的控制等高性能的车体控制。
此外,由于施加在卡钳上的液压控制也比以往的ABS系统更精密,运作时传导到制动杆上的反作用力也较小,使自然的减速感得以实现。
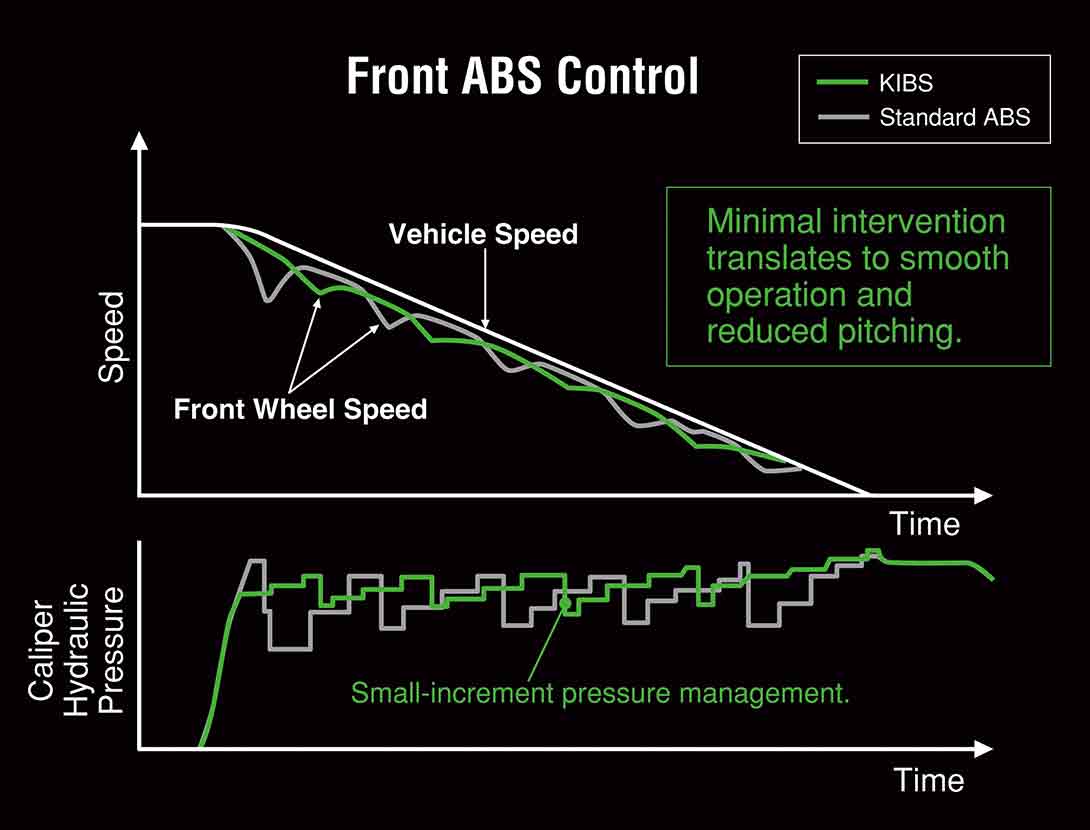

KIBS(川崎智能防抱死刹车系统)

KIPASS是一种只需随身携带便携式专用FOB钥匙(携带式终端),靠近摩托车,按下主控开关ON/OFF或者手动锁,就能上锁,解锁的非接触型智能钥匙系统。
FOB钥匙一旦接近车身,这个携带式终端就开始自动给车身一侧的KIPASS单位发射信号,进行认证。FOB钥匙和发动机防盗锁机能钥匙一样根据车辆不同发出的信号也不同,因此也具有防盗的功能。FOB钥匙即便是装在口袋里也能被感应到,因此不需要把钥匙从口袋掏出放入便可以对主控开关进行操作。
此外,双侧储物箱和加油口的开关都用带有钥匙孔的把手。只要FOB钥匙离开车身,就无法拉动把手,避免了钥匙孔外露,一定程度上防止了有人蓄意破坏。

KIPASS(川崎智能启动系统)
保持标准胎压至关重要,胎压会显著影响摩托车整体行驶性能。轮胎气体会随时间自然泄漏,因此定期检查胎压十分必要。胎压监测系统(TPMS)通过安装在各车轮气嘴处的传感器持续采集胎压数值,并在车辆行驶时将实时胎压显示在仪表屏幕上。
轮胎升温后胎压会出现明显变化,TPMS 会自动补偿温度影响,将测得压力换算至 20℃标准参考值,避免数值误导与误报警。
当胎压过低时,仪表会弹出轮胎警示图标提醒骑手,大幅提升长途骑行的安全感。
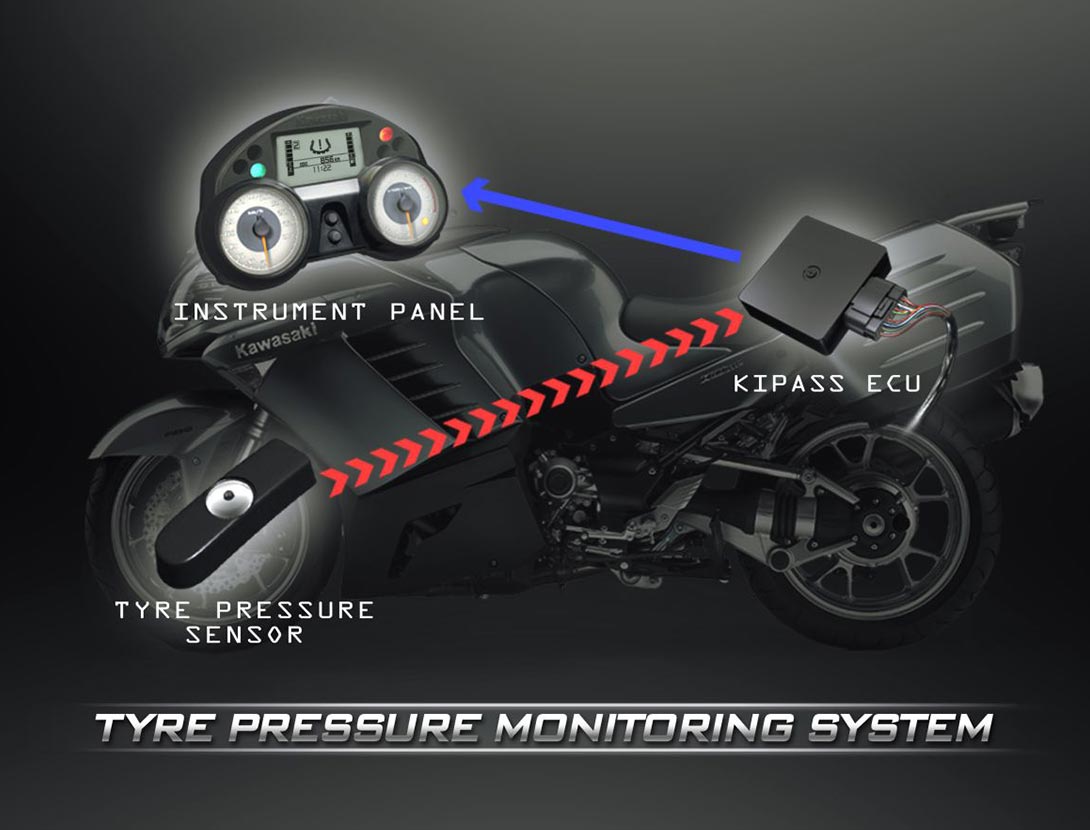

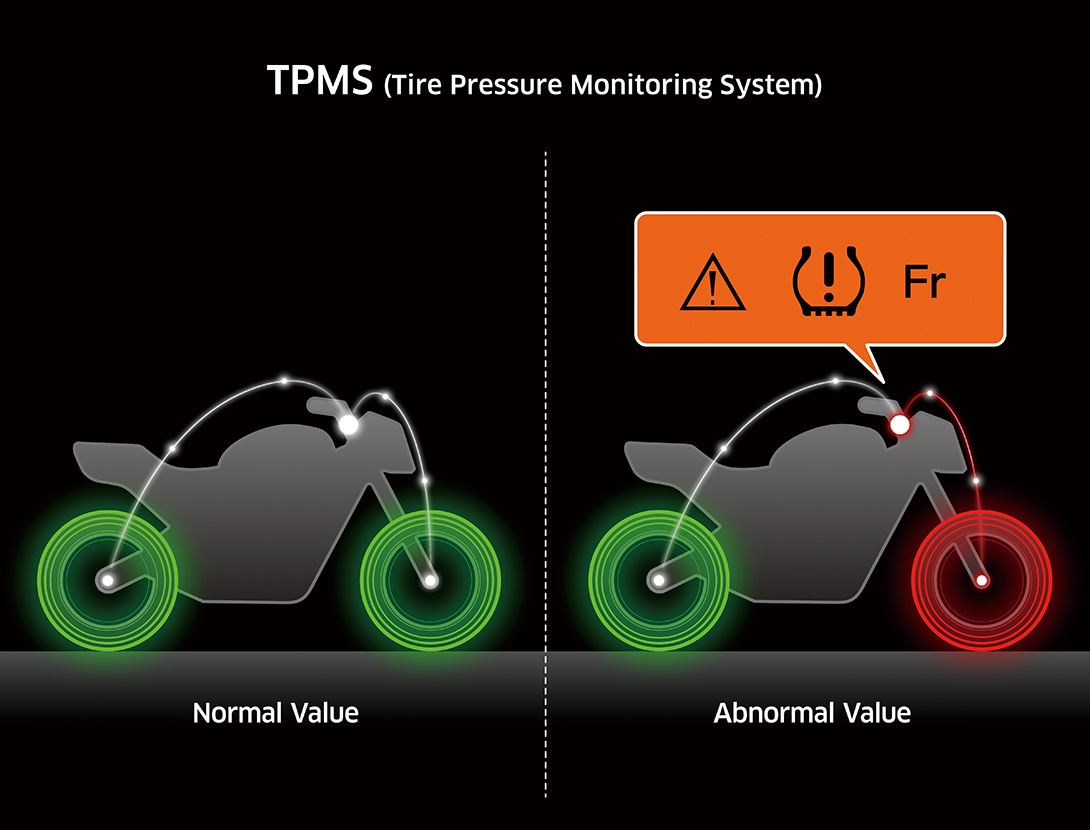
胎压监测系统(TPMS)
